Les robots pourraient-ils prochainement aider les secouristes à sauver les survivants d’une catastrophe naturelle? Cette mission nécessite que les robots puissent décider, de manière autonome, des actions à prendre et de l’ordre séquentiel de ces actions. Rien ne sert d’essayer de sortir la victime si les décombres ne sont pas dégagés…
Actuellement, ce sont les ingénieurs qui programment la séquence d’actions des robots. Mais cela pourrait bientôt changer. Mauro Birattari et Lorenzo Garattoni, chercheurs au laboratoire IRIDIA (Institut de recherches interdisciplinaires et de développements en intelligence artificielle) de l’École Polytechnique de l’Université libre de Bruxelles, viennent en effet de montrer que les robots pouvaient, collectivement, déterminer l’ordre des actions à mener.

Robotique en essaim
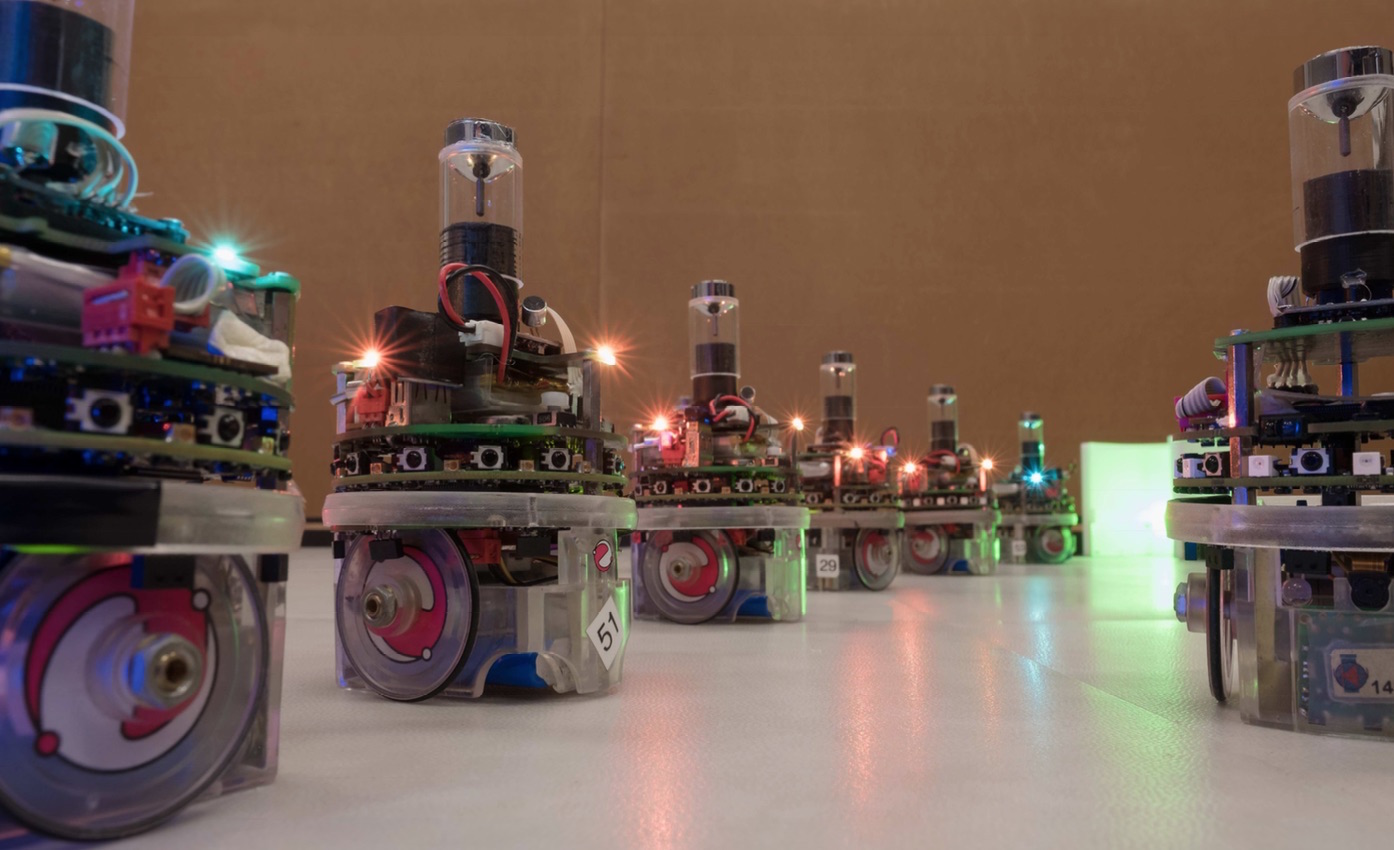
Les chercheurs du laboratoire IRIDIA se basent sur la robotique en essaim (“swarm robotics”). Cette discipline de la robotique s’inspire des comportements collectifs et organisés des animaux sociaux, comme les fourmis, par exemple, pour créer des groupes de robots dotés d’intelligence artificielle.
Actuellement, les robots sont capables de communiquer et de se coordonner entre eux pour prendre des décisions et réaliser des actions simples, comme déplacer un objet ou choisir un chemin parmi deux options.
Pour cette recherche, Mauro Birattari et Lorenzo Garattoni ont créé un essaim de robots capable de réaliser une suite de trois actions, sans connaitre au préalable l’ordre d’exécution correct.
En pratique, les robots doivent se rendre dans trois points de l’espace différents où des actions simples doivent être exécutées. Les robots ne découvrent s’ils ont exécuté les actions dans le bon ordre qu’après leur exécution. Afin de résoudre le problème, une partie des robots forme progressivement une chaîne entre les trois points de l’espace : cette chaîne sert de guide pour les autres robots, qui testent les combinaisons possibles en suivant les instructions des robots composant la chaîne. Et ce jusqu’à ce qu’ils trouvent, ensemble, la bonne séquence de tâches.
Habileté cognitive complexe
Cette étude démontre pour la première fois que des robots peuvent, collectivement, séquencer des actions dont l’ordre d’exécution est a priori inconnu. Considérée comme une habileté cognitive complexe, cette capacité à planifier des actions émerge suite aux interactions entre individus du groupe. Ensemble, les robots sont capables de planifier une suite d’actions, même si chaque individu du groupe ne serait pas capable de le faire tout seul.
“Cette recherche ouvre la voie à de nombreuses applications potentielles, nécessitant un groupe de robots « intelligents », c’est-à-dire capables de résoudre des problèmes de manière autonome”, indique l’ULB dans un communiqué.
“Les auteurs pensent à la recherche de survivants lors d’une catastrophe naturelle, à l’exploration de milieux inconnus ou hostiles à l’homme, à la construction de structures dans des sites dangereux ou encore à diverses applications dans le domaine de l’agriculture. La capacité, illustrée dans cette étude, de déterminer de manière autonome la séquence des tâches à accomplir est une habileté essentielle pour la réalisation de ce type de missions”.