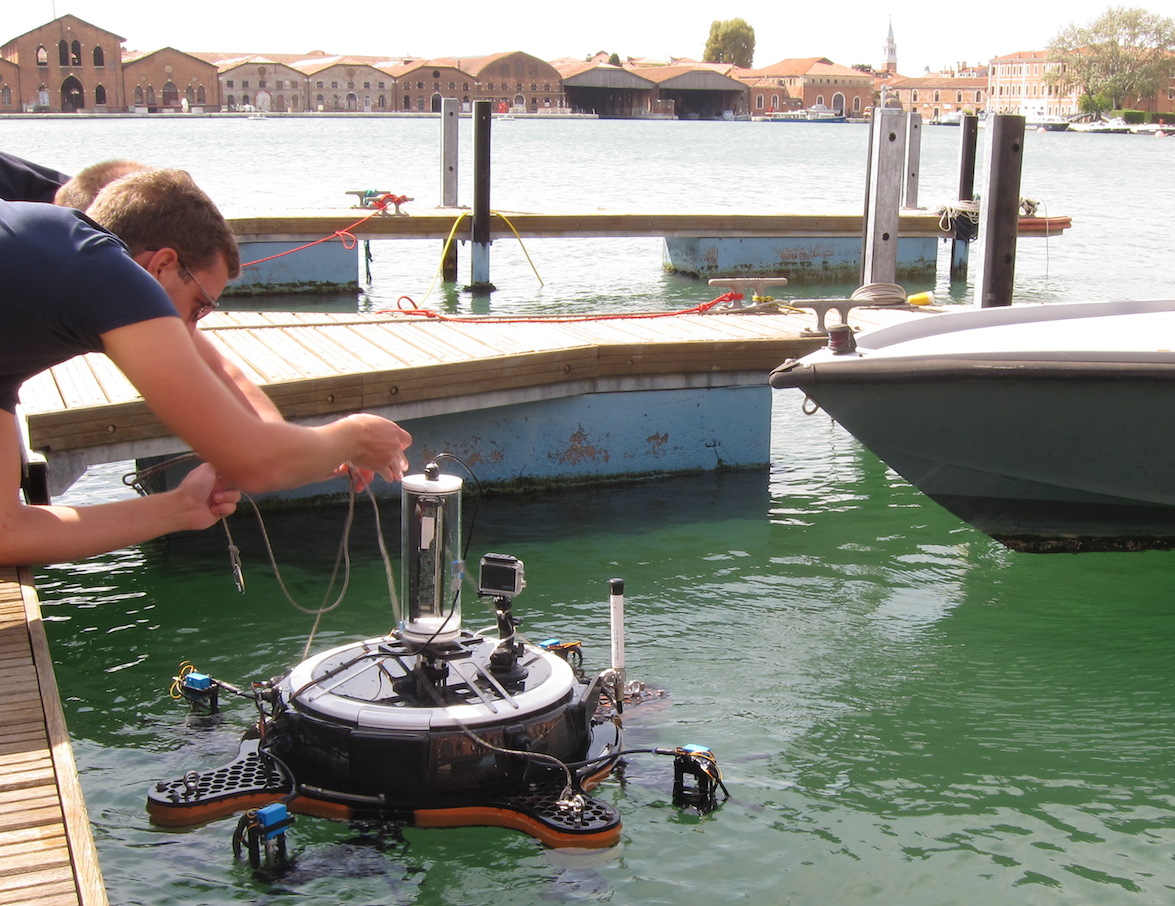
Dix-huit moules, deux énormes nénuphars et un poisson, tous parfaitement artificiels et bardés d’électronique, viennent de barboter pendant plusieurs heures dans la lagune de Venise. En surface, du côté de l’arsenal, une équipe internationale de chercheurs, dont le Dr Alexandre Campo, de l’Université Libre de Bruxelles (ULB), suivait de près leurs déambulations.
« Il s’agit du premier test de terrain des robots du projet subCULTron », explique le chercheur du Laboratoire du Service d’écologie sociale de l’ULB. Avec divers autres collègues, il participe depuis 2015 à ce projet européen pluridisciplinaire dirigé par les chercheurs laboratoire de la vie artificielle (Artificial Life Lab) de l’université de Graz (Autriche).
Communication optique, radio et acoustique
« Notre objectif était de tester toute une série de paramètres », reprend Alexandre Campo. « Notamment en ce qui concerne la communication entre les robots ».
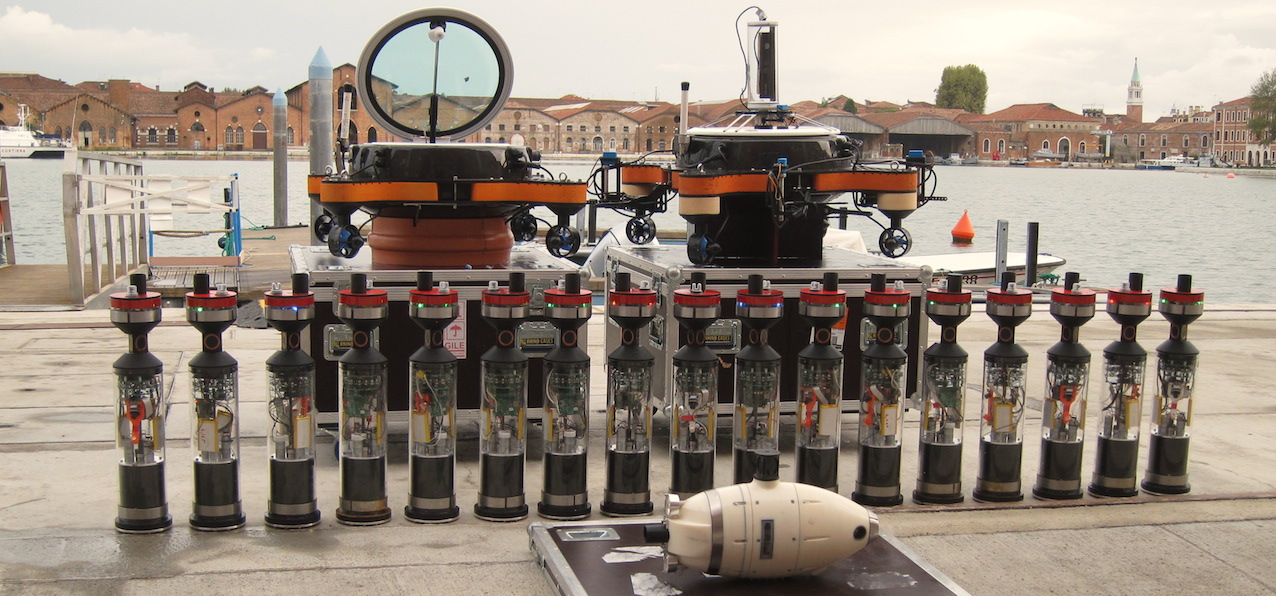
« Nos moules, appelées « aMussels » (pour moules artificielles), qui peuvent plonger au fond de la lagune, communiquent entre elles par signaux lumineux. Les ondes radios passent en effet très mal sous l’eau. Néanmoins, elles sont aussi capables de remonter en surface et d’échanger leurs informations avec nos nénuphars mobiles: les « aPads ». Dans ce cas, la communication passe par wifi ou par GSM ».
C’est également le cas pour le poisson robot (aFish). « Mais nous travaillons aussi sur des systèmes de communication acoustique. Ils sont intéressants sous l’eau. Mais ils sont aussi beaucoup plus gourmands en énergie que la communication par signaux lumineux », précise encore le chercheur.
Elaboration de comportements auto-organisés
L’expérience in situ de la semaine dernière a été concluante. « Les moules sont fonctionnelles », se réjouit le Dr Campo. Le projet subCONtrol, qui vise à mettre en place une nouvelle forme de surveillance environnementale, intelligente et de longue durée peut aller de l’avant.
Quant aux problèmes rencontrés lors de cette campagne de terrain, ils seront analysés et certainement riches en enseignements pour les chercheurs.
Dans le cadre de ce projet, le Dr Alexandre Campo et le Pr Jean-Louis Deneubourg, de l’Université libre de Bruxelles – seul partenaire belge du projet – sont chargés de la conception des comportements auto-organisés (sans leader) des groupes de robots sous-marins.

Le Service d’Ecologie sociale de l’ULB s’inspire de comportements collectifs observés chez des animaux sociaux et pré-sociaux tels que les blattes, les fourmis ou les poissons.
120 robots en préparation
« Des modèles mathématiques ainsi que des règles comportementales sont produits sur la base de ces observations afin de comprendre les mécanismes et les interactions qui sont à la source des comportements collectifs. Les chercheurs intègrent l’information aux robots afin de produire et de surveiller des comportements collectifs novateurs », rappelle-t-on à Bruxelles.
Lors de la phase finale du projet, en 2019, l’essaim devrait compter au total quelque 120 robots. Ils seront chargés de recueillir diverses données environnementales dans les canaux de Venise. Ces données permettront de mieux comprendre les interactions complexes entre flore, faune, écologie, industrie, tourisme et d’extrapoler le futur de la lagune.
[…] 09.18.17 Espèces envahissantes dans la lagune de Venise […]